2026-05-29 0
在音乐演奏中,连音技巧让音符如流水般自然衔接。机器人领域同样追求这种流畅性,但实现起来却面临巨大挑战。
机器人领域同样在追求这样的"连音"效果:让机器人的动作像音乐一样流畅自然,没有犹豫和停顿。然而,要让一台机器人真正做到这一点,远比想象中困难。
近日,一项突破性研究成果《Learning Native Continuation for Action Chunking Flow Policies》被机器人顶会RSS 2026接收!这项研究开创性地从训练机制入手,赋予机器人动作天然的连续性,在五个真实操作任务上展现出卓越性能。
论文标题:Learning Native Continuation for Action Chunking Flow Policies
论文链接:https://arxiv.org/pdf/2602.12978
项目主页:https://lyfeng001.github.io/Legato/
Legato 的核心思想可以用一句话概括:与其在推理时给模型 "打补丁",不如在训练时就让模型学会如何天然地生成连续的动作。
这个思路的转变看似简单,实现起来却需要解决两个关键问题:
如何在训练时让模型真正 "看到" 并学会利用已知的前缀信息
如何确保训练时学到的行为和推理时实际执行的行为完全一致,不出现 "双重标准"
Legato 通过四个精心设计的机制,系统性地解决了这两个问题。一个直觉上的类比是:我们希望机器人就像一位经验丰富的接力跑运动员:不仅知道自己该跑哪一段,还清楚地知道上一棒跑到了哪里、速度是多少,并据此调整自己起跑的节奏,而不是每次都从静止状态重新出发。
在标准的流匹配训练中,模型每次都是从完全随机的噪声出发。这就好比让一个学生每次都从一张白纸开始作答,永远不知道"如果已经写了一半,接下来该怎么写"。
Legato 引入了引导向量 ω∈[0,1]^H,将训练起点变为"噪声与真实动作的混合":
对于已执行前缀部分(ω=1):初始状态直接采用真实动作
对于未来预测部分(ω=0):初始状态保持纯噪声
对于过渡区域(0<ω<1):初始状态为真实动作和噪声的混合
通过这种设计,模型在训练时就能反复练习"如何从部分已知的状态出发",而不是每次都从零开始。
研究团队发现,仅改变初始状态会导致模型逐渐"忘记"前缀信息。为解决这个问题,Legato在每一步去噪前都进行混合,如同给模型安装了一个"记忆锚"。
Legato 重新推导训练目标,使其与逐步引导的推理动力学完全对齐。这个公式保留了标准流匹配的几何方向,仅根据引导强度调整速度大小,实现了训练和推理的无缝衔接。
为适应不同硬件平台和任务需求,Legato 在训练时对混合参数(d,r)进行随机化:
d(推理延迟):控制前缀长度,适配不同计算速度
r(过渡qu长度):控制动作流畅程度
这种设计使单一模型就能适应多种场景需求,大大降低了部署门槛。
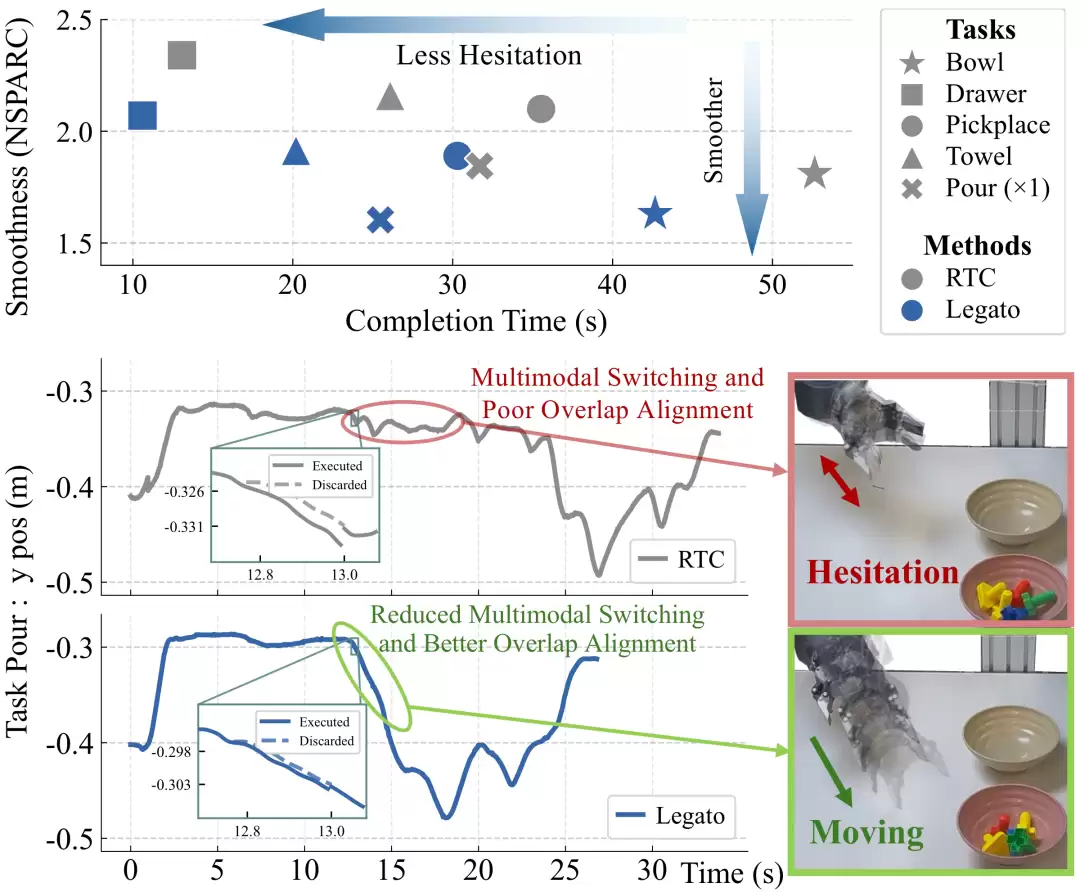
研究团队在双臂机器人上测试了五个代表性操作任务:叠碗、倒东西、拾取放置、叠毛巾、开抽屉。这些任务涵盖了多种运动模式和多模态选择场景。
实验结果显示:
犹豫现象显著减少,动作轨迹更加干净利落
任务完成时间平均缩短约10%
轨迹平滑性平均提升约10%,部分任务提升超过40%
研究建议在d=delay, s=0.5H, r=H-d-s的参数设置下部署,并在标准flow matching训练基础上进行Legato微调。
Legato开创性地解决了机器人动作连续性难题,其核心突破在于:
通过训练内化连续性能力
确保训练推理完全一致
实现灵活可控的部署
这项研究为机器人流畅操作提供了全新思路,将推动具身智能技术迈向更高水平。
大家都在看
Copyright(C) 2020-2026 jiyx.com All Rights Reserved 联系方式:[email protected]




