2026-06-02 0
机器人技术迎来重大突破,首次实现了依靠本能完成精细操作的能力。这项由清华大学团队研发的创新技术,突破了传统视觉-语言-动作模型的局限,开创了具身智能的新路径。

在最新演示中,机器人展现出令人惊叹的操作能力:
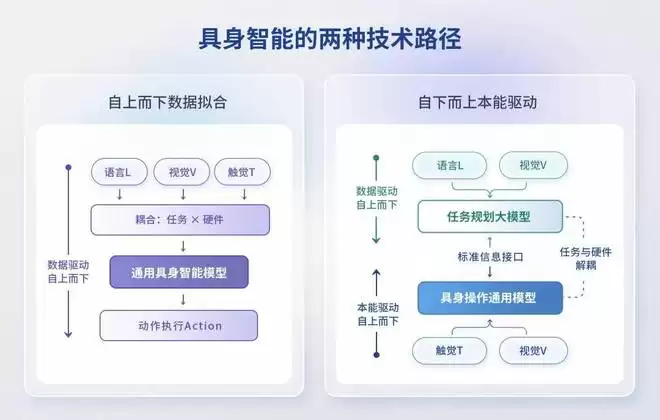
这项技术的核心突破在于采用了全新的"本能驱动"方法,与当前主流的VLA(视觉-语言-动作)模型形成鲜明对比。研究团队经过8年探索,开发出了独特的解决方案。
当前主流的具身智能研究主要采用VLA模型,其工作原理是通过大量人类操作数据进行模仿学习。这种方法存在几个关键问题:

研究团队提出了全新的技术架构:
Natus模型包含三大核心本能:
为实现本能驱动,团队开发了第三代视触觉传感器:

在实际测试中,机器人展现出惊人能力:

团队正在开发Magis技能模型,目标包括:

该技术已在多个领域实现商业化应用:

这项突破性技术重新定义了机器人操作的基本原理,通过回归触觉本能和物理规律,为具身智能开辟了全新路径。其低数据依赖和快速部署特性,正在推动工业自动化进入新阶段。

机器人技术的发展正迎来关键转折点,这项基于触觉本能的研究突破,不仅解决了当前具身智能面临的核心挑战,更为未来智能机器人的发展指明了方向。从实验室到生产线的快速转化,证明了这一技术路线的实用价值和广阔前景。
大家都在看
Copyright(C) 2020-2026 jiyx.com All Rights Reserved 联系方式:[email protected]




