




《猫猫钓游记》可爱+收集+钓鱼游戏试玩
2026-06-30
2026-07-03 0
幻尔科技的PuppyPi自推出以来,以其出色的稳定性和开放的学习生态,受到了广大机器人爱好者、教育者及开发者的喜爱。其核心魅力之一,便是它高度仿生且稳定的步态系统。今天,我们就来详细解析,PuppyPi是如何实现这些稳健而灵动的“步伐”的。

真正的稳定,首先源于一副能灵活响应的身体。PuppyPi的连杆腿部结构能让小腿的摆动更迅速、范围更广,同时确保大腿与小腿运动轨迹完美错开,互不干扰,如同为机器狗赋予了真正动物般的灵巧关节,从物理层面奠定了灵活稳健的基础。

机身结构采用高强度硬铝合金制成,在带来轻盈与坚固的同时,结合金属轴承关节赋予了机器狗快速响应所需的最低惯性,从而能在桌面上灵敏转身、稳健踏步,将每一个控制指令都转化为精准而优雅的动作。
有了好身体,更需要一个能实时计算的“小脑”。PuppyPi的核心搭载了新一代树莓派5主板,其性能可达前代的2-5倍。这意味机器狗能在每秒内处理更多的传感器数据、进行更复杂的运动学计算。当它行走时,这颗“小脑”在持续进行微秒级的调整:如何灵活切换步态以应对不同场景?如何调整姿态应对地面起伏?这一切计算都发生在瞬间,让稳定不再是静态的姿势,而是一种动态的、智能的平衡保持能力。

拥有了稳健的硬件与智能内核,接下来便是真正驾驭它的潜力。PuppyPi将运动控制转化为直观的交互体验,让你能够自由调节它的每一个“步态”,并轻松设计出不同的“姿态”。
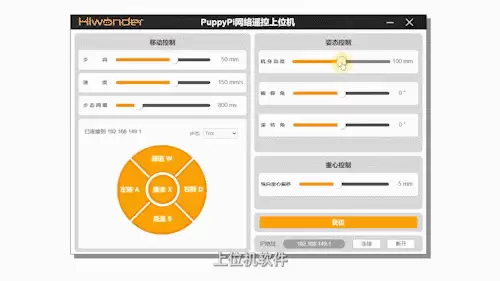
通过配套的上位机软件,你可以直接调整Walk(行走)、Trot(小跑)等步态的核心参数,包括触地时间、离地高度与步态周期,并实时看到机器狗随之改变的行为表现。而当你想让机器狗摆出特定姿态时,无需面对复杂公式,通过可视化动作编辑软件,将设计“逆运动学”变成拖拽积木般直观操作:只需设定脚掌的目标位置,系统便实时解算出所有关节的转动角度。
从步态调试到姿态设计,形成一个完整的认知闭环。这不仅让你掌握机器狗稳健行走的控制能力,更培养将抽象理论转化为生动实践的综合能力。
PuppyPi的“稳”,让它成为了一个可靠的移动平台。基于树莓派5的强大扩展性与内置的ROS1/ROS2系统,它能轻松接入激光雷达、机械臂等硬件,从而解锁建图导航、智能抓取等复杂任务。配合其内置的高清广角摄像头与多模态AI模型,更可实现人脸识别、目标跟踪、视觉巡航,甚至自主攀爬等玩法。


这意味着,PuppyPi从一个卓越的步态学习平台,进化为了一个“感知-决策-执行”一体化的智能机器人开发平台。无论你是想验证SLAM算法,还是尝试具身智能应用,PuppyPi都能让你在真实、动态的物理环境中,将想法稳健地变为现实。
无论是初探机器人世界的学生、深耕技术教育的老师,还是满怀创意的开发者,PuppyPi所提供的不仅是一台走得稳的机器狗,更是一个值得信赖的探索伙伴。它让学习可见,让创意可触,让每一步探索都可靠而有趣。
Copyright(C) 2020-2026 jiyx.com All Rights Reserved 联系方式:[email protected]